| ติดต่อสอบถาม 086-218-5488 E-mail : mungmat@hotmail.com |
 |
 |
 |
 |
 |
 |
| LEVEL 5 |
| การเคลื่อนที่ของสิ่งมีชีวิต : ศึกษาเรื่องการเคลื่อนที่ของสิ่งมีชีวิต |
|
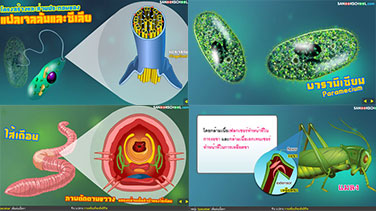
การเคลื่อนไหวโดยอาศัยการไหลของไซโทพลาซึมหรือเท้าเทียม สิ่งมีชีวิตเซลล์เดียวที่เคลื่อนที่โดยอาศัยเท้าเทียม (pseudopodium) ได้แก่ อะมีบา:: เคลื่อนที่โดยอาศัยการไหลของไซโทรพลาสซึม หรือเท้าเทียม (Pseudopodium(ชูโดโพเดียม)โดยการที่ไซโทรพลาสซึม ทำให้เอนโดพลาสซึมไหลไปในทิศทางที่อะมีบาจะเคลื่อนที่แล้วปรับสภาพเป็นเอ็กโทพลาสซึม www.nana-bio.com |
การเคลื่อนที่ของพารามีเซียม พารามีเซียม (Paramecium) เป็นสิ่งมีชีวิตขนาดเล็กจำพวกโปรโตซัว ซึ่งมักเกิดในบริเวณที่ม
http://home.kku.ac.th/pracha/Paramecium.htm |
แฟลเจลลัมและซีเลีย ซีเลีย (cilia หรือ cilium ในรูปเอกพจน์) เป็นออร์แกเนลล์ที่พบในเซลล์จำพวกยูแคริโอต (eukaryotic cell) ซิเลียมีลักษณะบาง
แฟลเจลลัม (อังกฤษ: flagellum, พหูพจน์: flagella) เป็นเส้นใยขนาดยาว ที่ยืดยาวออกมาจากเซลล์ มีลักษณะการเคลื่อนที่คล้ายแส้
http://th.wikipedia.org |
โครงสร้างแฟลเจลลัมและซีเลีย โครงสร้างภายในแฟลเจลลัมและซิเลียจะค้ำจุนด้วยหลอดโปรตีนไมโครทิวบลู(microtubules) โดยไมโครทิวบูลมีการจัดเรียงตัว http://www.wangchan.ac.th/teacher_issue/t712/unit12.html.html |
ไส้เดือน ไส้เดือนดิน หรือที่นิยมเรียกสั้น ๆ ว่า ไส้เดือน (อังกฤษ: Earthworm) เป็นสัตว์ไม่มีกระดูกสันหลังในไฟลัมแอนเนลิดา |
การเคลื่อนที่ของไส้เดือน ไส้เดือนดินเคลื่อนที่โดยจะใช้เดือยส่วนท้ายจิกดินไว้ เพื่อป้องกันไม่ให้ส่วนท้ายเคลื่อนที่ ขณะเดียวกันกล้ามเนื้อวงจะหดตัว http://www.wangchan.ac.th/teacher_issue/t712/unit27.html |
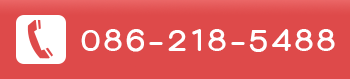
การเคลื่อนที่ของแมลง(ตั๊กแตน) แมลง (insect) เป็นสัตว์ไม่มีกระดูกสันหลังแต่แมลงมีโครงร่างภายนอก (exoskeleton) ซึ่งเป็นสารพวกไคทินมีลักษณะเป็นโพรง แมลงเป็นสัตว์ขนาดเล็ก มีลำตัวเบา แต่มีปีกขนาดใหญ่เมื่อเทียบกับลำตัว แมลงมีระบบกล้ามเนื้อเป็น 2 แบบ คือ
http://newjume.blogspot.com/2012/10/blog-post_8433.html |